|
Introduction
S K Dynamics (SKD) was established in the year 1992 with the
objective of pursuing unique, Hi-Tech R&D projects in the area
of Electro-Mechanical Engineering (Mechatronics) supported with
complex DSP and Power Electronics.
The history of SKD and its mentor declares the variety and blend
of products stirred up by the market requirement. Even when
computers were just entering India, CEO of SKD was involved in
DSP projects.
Vertical Take-Off & Landing (VTOL) and stationary position in
air was always been a challenge, and was solved by the invention
of Helicopter in year 1931. challenge, and was solved by the invention
of Helicopter in year 1931.
S K Dynamics set its target on the AVIONICS market by providing
High Performance lightweight motors that can be used in Flying
Car and can also replace the Tail-Rotor of the Helicopter.
SKD has great experience in the field of motors and motor
control using Embedded systems. It has also provided unique DSP
based motor control solutions to Analog Devices Inc., USA.
SKD has started this venturous project in September 2000 and
till now 6 prototypes have been developed and prototype 7 is
under progress.
SKD is looking forward for prototypes 8, 9 and 10 with new
designs and further improvements very soon.
IITKanpur [INDIA] analyzed the feasibility of electrical
transmission based Flying Car and gave a positive feasibility
report.

Present Prototype
SKD is now working on the prototype P7. This Prototype consists
of a BLDC Thrust motor, Structure, Electronic control for BLDC
Thrust motor, Batteries, Servos for flight control, Servo
control electronics and RF module. A RF remote control
facilitates PC connectivity.
The proposed prototype is a Toy, but with appropriate
modification the same could be used as a UAV (unmanned aerial
vehicle) and will be useful for survey purpose.
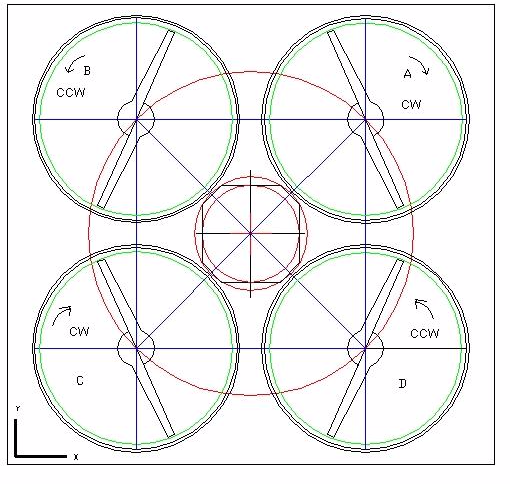
The propellers are mounted on the BLDC motors and two sets of
servos are used to control tilt of stabilizer flaps in X-axis,
which allows Yaw and quick forward / reverse control
The additional two stabilizers in Y-axis are used with fixed
tilt to counter the torque on structure in Z-axis so Yaw motion
is stable. The propeller is ducted to ensure maximum safety
during operation.
The Pitch Roll and Yaw movements of the propellers will be
controlled by changing the speed of the BLDC motor. The motion
can be controlled according to the following Flight Control
table.
|
CW |
CCW |
CW |
CCW |
|
|
A |
B |
C |
D |
Motion |
|
+ |
- |
- |
+ |
Pitch
+ , X - |
|
- |
+ |
+ |
- |
Pitch - , X + |
|
+ |
+ |
- |
- |
Roll + , Y - |
|
- |
- |
+ |
+ |
Roll - , Y + |
|
+ |
- |
+ |
- |
Yaw
+ |
|
- |
+ |
- |
+ |
Yaw
- |
|
+ |
+ |
+ |
+ |
Z + |
|
- |
- |
- |
- |
Z - |
The prototypes P8, P9, P10 will be started soon and there
supposed design specifications along with that of prototype P7
are as follows:
|
VTOL -FCAR- UAV- P7 , P8, P9 |
|
Common Parameters |
|
Propellers / VTM - 4 |
|
Drive BLDC , Mounted Blow Propeller |
|
Parameter |
P7 |
P8 |
P9 |
P10 |
|
Disk Diameter |
14-35cm |
28- 70cm |
56- 140 cm |
112-280 cm |
|
Total Disk Area (sq m) |
0.4 |
1.6 |
6.4 |
25.6 |
|
Thrust (Kg) |
4 |
16 |
64 |
256 |
|
Disk Loading (Kg/sq m) |
10 |
10 |
10 |
10 |
|
VTM Assembly wt.(Kg) (Mot+Drv+Prop+Duct) |
0.9 |
2.5 |
7 |
25 |
|
Prop Speed (RPM) |
4000 |
2800 |
2000 |
1000 |
|
BLDC # poles,# stator slots |
24,18 |
36,27 |
56,42 |
96,72 |
|
O/P Motor (W) |
250 |
1000 |
3000 |
6000+,6000 |
|
Battery |
36V ,2AH |
72 V,8AH |
Engine,Alter |
Engine, Alter |
|
Torque (N-m) |
0.6 |
3 |
15 |
60+,60 |
|
Magnet D (mm) |
31 |
53 |
136 |
217 |
|
Stack length (mm) |
20 |
25 |
20 |
11+,11 |
|
Motor wt. (kg) |
0.35 |
1.2 |
4 |
15 |
A Brief History of SKDs Flying Car.
SKD has a vast experience in electromechanical technology and is
busy since September 2000 to make its dream come true of
developing an Electrical Transmission based Flying Car which
is a VTOL vehicle.
Development of first prototype was started in September 2000.
Since then different possibilities have been explored in the
form of few prototypes (P1, P2, P3, P4, P5 and P6). The design
and development of P7 is in progress.
Overview of results till date
Prototype P1
Configuration:

It is a double seater, 85 HP flying car prototype. There are 16
motors with 6 HP capacity each. 12 are outer rotor PMSM
sensorless vertical Thrust Motors .Remaining 4 are common
Thrust BLDC Motors fitted in wheels for the horizontal
movement. Structure is very stable and strong . The Target
was 1 HP/Kg at 500 Hz. And we tested it till 3 kW at 430 Hz
which can be maximize to 525 Hz.
Shortcomings:
The structure is very large and heavy, and High cost is required
for its development.
Prototype P2
Configuration:

This second prototype has a Single seating arrangement, 6
Thrust Motors are employed to perform the function of
vertical lift and 2 of them would be re-positioned for
Horizontal Flight. Upto 50 Kg thrust was tested.
Shortcomings:
Motors were outer rotor types generating 4000 rpm
which was not matching with the propeller, Torsional vibration
problem was encountered.
Prototype- P3
Configuration:
It is a Scaled Model of P2, weighing 12.5 Kg .
6 Thrust Motors are employed to perform the function
of vertical lift. These Thrust Motors are PMSM type of
capacity 0.75 HP each. And this was developed to study the
interaction of multiple propellers.
Shortcomings:
The structure was instable and was not rigid enough due to
scaled down model. instable and was not rigid enough due to
scaled down model.
Prototype- P3B
BConfiguration:
This was a setup to test the Propeller thrust generated
by the motors used in P3. This setup of 4 motors
generated a thrust of 10 Kg and was lifted in air
as seen in the picture.
Prototype- P4
Configuration:
An automotive engine was employed to drive twin
rotor assembly coupled by a mechanical transmission.
Test setup to verify propeller efficiency. Thrust upto 65 Kg
was tested with this prototype using propellers of diameter
4 meter.
Shortcomings:

This Prototype also suffered a drawback of heavy weight and also
lacked safety arrangement i.e.
Duct.
Propellers :
Crude propellers were employed in the beginning. Propellers used
in rest of the prototypes were
self designed based on Air Foil No. NACA 4412
and were made up of Aluminum (Alloy 6063, T6)
Extrusion.
Prototype- P5

Configuration:
It has a single seating arrangement and can also be used as an
Unmanned vehicle for survey purpose.
It has a counter rotating double propeller assembly.
Also two additional small propellers with stabilizers are
provided for flight control .
The Disk Loading of 10 Kg /sq m provides a thrust of 5 to 7 Kg
/HP.
Prototype P5 is not obsolete but work on this prototype is
presently paused due to financial limitation. thrust of 5 to 7 Kg
/HP.
Prototype P5 is not obsolete but work on this prototype is
presently paused due to financial limitation.
Shortcoming:
The weight of the prototype is 148 Kg, which can be reduced if
proper aircraft material is used.
Prototype- P6
Also developed on the guidelines of prototype P5 but much
reduced in weight and this time the Propellers were also ducted,
which not only ensured safety but also increased horizontal
upthrust.
This Prototype has been specifically designed for unmanned
aerial vehicle.
CONTACT INFORMATION
Rakesh Goel, CEO
S K DYNAMICS Pvt. Ltd.
B-5 ,Industrial Estate,
Roorkee-247667
UA, India
Phones: +91-1332-263616,
+91-1332-261131
Fax : +91-1332-264083
Email : skdtech@nde.vsnl.net.in
Web : www.skdynamics.com
UP
|

